
Call us in Seattle
+1 (800) 871-6550
Blog:
NXP iMX8MM Cortex-M4 核心 GPT Capture 测试
Thursday, March 7, 2024
简介
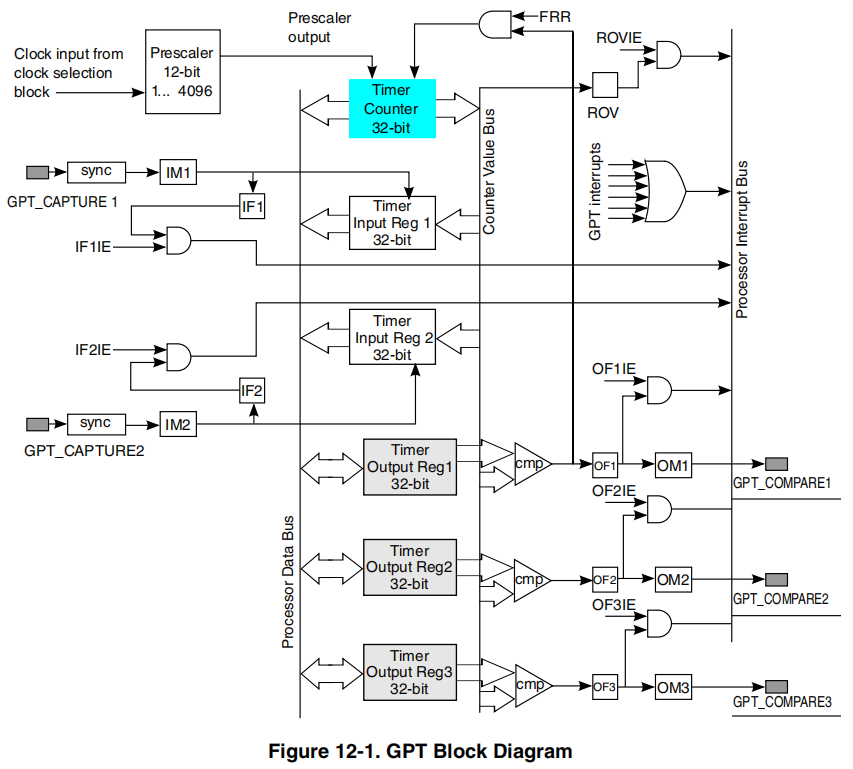
NXP i.MX8 系列处理器均为异构多核架构 SoC,除了可以运行 Linux 等复杂操作系统的 Cortax-A 核心,还包含了可以运行实时操作系统比如 FreeRTOS 的 Cortex-M 核心,本文就演示通过 NXP i.MX8MM 处理器集成的 Cortex-M4 核心来运行 GPT (General Purpose Timer) 输入采集功能模块的测试。![]()
I.MX8M Mini 处理器 GPT 模块硬件比较简单,如下框图,可以实现 Capture 捕获输入功能和 Compare 定时输出功能。
本文所演示的ARM平台来自于Toradex 基于NXP i.MX8M Mini ARM处理器的Verdin iMX8MM ARM嵌入式平台。
准备
a). Verdin i.MX8MM ARM核心版配合Verdin Development Board,连接调试串口(载板X66)到开发主机方便调试,X66 连接了4个串口,其中第三个是 Cortex-M4 核心的默认调试串口,第四个是 Cortex-A53 核心的默认调试串口。
b). 为了测试 GPT 输入捕获, 相应的需要一个PWM 波发生设备,这里使用Toradex 基于NXP i.MX8M Plus ARM处理器的Verdin i.MX8MP 核心板配合 Dahlia Board 作为PWM output使用。同样连接调试串口(载板X18)到开发主机方便调试。
c). Verdin i.MX8MP Cortex-A53 核心系统使用Toradex Yocto Linux BSP6, 更多说明请参考这里。
d). 参考如下将 Verdin i.MX8MP PWM1 连接到 Verdin i.MX8MM GPT1 Capture 管脚,同时为了阻断载板其他电路干扰,将 Verdin Development Board X6 Pin_24 的跳线帽去掉。
Dahlia Board X20 Pin_9 -> Verdin Development Board X5Pin_24 SODIMM_252
Verdin i.MX8MM M4核心FreeRTOS基本资料
a). Verdin i.MX8MM HMP(Heterogeneous Multi-core Processing) 架构基本说明请参考如下:
https://developer.toradex.cn/software/cortex-m/hmp-memory-areas-on-toradex-soms/
b). 参考如下说明下载配置 NXP 用于开发 Cortex-M 核心的 MCUXpresso SDK
https://developer.toradex.cn/software/cortex-m/setting-up-sdk-toolchain/
c). Verdin i.MX8MM 编译运行 M4 firmware 操作流程请参考如下文章
https://developer.toradex.cn/software/real-time/freertos/freertos-on-the-cortex-m4-of-a-verdin-imx8mm
d). MCUXpresso SDK 包含的 sample 示例应用可以参考如下 SDK 源位置
$cd <SDK_root>/boards/evkmimx8mm/$ tree -L 2.├── cmsis_driver_examples│ ├── ecspi│ ├── enet│ ├── i2c│ └── uart├── demo_apps│ ├── hello_world│ └── sai_low_power_audio├── driver_examples│ ├── ecspi│ ├── enet│ ├── gpio│ ├── gpt│ ├── i2c│ ├── pdm│ ├── pwm│ ├── rdc│ ├── sai│ ├── sdma│ ├── sema4│ ├── tmu│ ├── uart│ └── wdog├── evkmimx8mm.png├── freertos_examples│ ├── freertos_event│ ├── freertos_generic│ ├── freertos_hello│ ├── freertos_mutex│ ├── freertos_queue│ ├── freertos_sem│ ├── freertos_swtimer│ └── freertos_tickless├── multicore_examples│ ├── rpmsg_lite_pingpong_rtos│ └── rpmsg_lite_str_echo_rtos└── project_template ├── board.c ├── board.h ├── BOARD_Project_Template_evkmimx8mm.cmake ├── clock_config.c ├── clock_config.h ├── peripherals.c ├── peripherals.h ├── pin_mux.c └── pin_mux.h
Verdin i.MX8MM Cortex-M4核心FreeRTOS GPT Capture示例驱动开发
a). Verdin i.MX8MM MCUXpresso SDK 已经包含一个简单的 GPT Capture sample驱动,本文基于此 sample 进行修改测试。
$cd <SDK_root>/boards/evkmimx8mm/driver_examples/gpt/capture$ tree -L 1.├── armgcc├── board.c├── board.h├── clock_config.c├── clock_config.h├── empty_rsc_table.c├── fsl_iomuxc.h├── gpt_capture.c├── gpt_capture_v3_14.xml├── pin_mux.c├── pin_mux.h└── readme.md
b). 首先先确认 pin_mux 定义以及其他 i.MX8MM 初始化基本配置,如果需要可以进行修改
./ pin_mux.h/pin_mux.c 用于确定项目中使用的管脚定义,本文中使用的正好就是示例默认的 GPT1 Capture1 管脚,因此无需修改。如果用到其他管脚,就需要进行修改,支持的所有管脚定义可以参考 fsl_iomuxc.h 文件。
/* FUNCTION ************************************************************************************************************** Function Name : BOARD_InitPins* Description : Configures pin routing and optionally pin electrical features.** END ****************************************************************************************************************/void BOARD_InitPins(void) { /*!< Function assigned for the core: Cortex-M4[m4] */ IOMUXC_SetPinMux(IOMUXC_SAI3_RXFS_GPT1_CAPTURE1, 0U); IOMUXC_SetPinMux(IOMUXC_UART4_RXD_UART4_RX, 0U);
...
./ board.h/board.c 用于 i.MX8MM M4 核心基本初始化配置,本文不做修改。
./ clock_config.h/clock_config.c 用于 i.MX8MM M4 核心基本时钟配置,本文不做修改。
c). GPT Capture 功能实现
./ 本文 GPT Capture 功能定义
GPT1 capture1 管脚输入一个给定频率(如 1k Hz )和占空比(如 50% ) 的PWM 信号,通过捕获输入上升/下降沿中断,分别获得相邻两次中断的 GPT Counter 计数器的计数,并以此来计算输入 PWM 信号的半波周期。
./ GPT Capture 功能基本都是通过 gpt_capture.c 文件代码来实现,默认 sample 是捕获上升沿中断后,打印中断当时的 GPT Counter 计数数值。
./ 为了实现本文定义的捕获功能,首先增加如下全局变量定义
/*******************************************************************************
* Variables
******************************************************************************/
volatile bool gptIsrFlag_Start = false;
volatile bool gptIsrFlag_Finish = false;
volatile uint8_t gptIsrFlag_Overflow = 0;;
volatile uint32_t captureVal = 0;
volatile uint32_t captureVal_Last = 0;
// gptIsrFlag_Start 定义为第一次捕获中断开始标志
// gptIsrFlag_Finish 定义为第二次捕获中断结束标志
// gptIsrFlag_Overflow 定义为 GPT Counter 溢出标志
// captureVal 定义为第二次中断 GPT Counter 计数
// captureVal_Last 定义为第一次中断 GPT Counter 数值
./ GPT Interrupt 函数修改如下:
首先处理计数器溢出情况,如果中断发生时候已经发生溢出,则增加 gptIsrFlag_Overflow 溢出标志计数的数值;然后通过 gptIsrFlag_Start / gptIsrFlag_Finish 标志位来分别处理第一次和第二次中断,获取第一次和第二次中断时候的 GPT Counter 数值,同时分别翻转 GPT Capture Interrupt 模式。
void EXAMPLE_GPT_CAPTURE_IRQHandler(void){ /* GPT Counter Overflow processing */ if (GPT_GetStatusFlags(DEMO_GPT_BASE, kGPT_RollOverFlag) != false) { GPT_ClearStatusFlags(DEMO_GPT_BASE, kGPT_RollOverFlag); }
if (GPT_GetStatusFlags(DEMO_GPT_BASE, kGPT_InputCapture1Flag) != false) { if(gptIsrFlag_Finish != true) { /* First time IRQ */ if (gptIsrFlag_Start == false) { captureVal_Last = GPT_GetInputCaptureValue(DEMO_GPT_BASE, BOARD_GPT_INPUT_CAPTURE_CHANNEL); /* Switch Interrupt mode to falling edge */ GPT_SetInputOperationMode(DEMO_GPT_BASE, BOARD_GPT_INPUT_CAPTURE_CHANNEL, kGPT_InputOperation_FallEdge); gptIsrFlag_Start = true; } /* Second time IRQ */ else { captureVal = GPT_GetInputCaptureValue(DEMO_GPT_BASE, BOARD_GPT_INPUT_CAPTURE_CHANNEL); /* Switch Interrupt mode to rising edge */ GPT_SetInputOperationMode(DEMO_GPT_BASE, BOARD_GPT_INPUT_CAPTURE_CHANNEL, kGPT_InputOperation_RiseEdge); gptIsrFlag_Start = false; gptIsrFlag_Finish = true; } } GPT_ClearStatusFlags(DEMO_GPT_BASE, BOARD_GPT_CHANNEL_FLAG); } SDK_ISR_EXIT_BARRIER;}
./ Main 主函数修改如下:
int main(void){ uint64_t int_Peroid = 0;
uint32_t time_Ms = 0;
uint32_t time_Us = 0;
gpt_config_t gptConfig;...GPT_GetDefaultConfig(&gptConfig); /* Initialize GPT module */ GPT_Init(DEMO_GPT_BASE, &gptConfig);.../* Setup input capture on a gpt channel */ GPT_SetInputOperationMode(DEMO_GPT_BASE, BOARD_GPT_INPUT_CAPTURE_CHANNEL, kGPT_InputOperation_RiseEdge);... /* Enable GPT Overflow interrupt */ GPT_EnableInterrupts(DEMO_GPT_BASE, kGPT_RollOverFlagInterruptEnable);...while (true) { /* Check whether occur 2nd interupt */ if (true == gptIsrFlag_Finish) { /* GPT counter diff value between 2 IRQs */
int_Peroid = gptIsrFlag_Overflow * (uint64_t) 0xffffffff;
int_Peroid = int_Peroid + captureVal;
int_Peroid = int_Peroid - captureVal_Last;
/* transfer counter value to peroid */
time_Us = (uint32_t) ((int_Peroid / 24) % 1000);
time_Ms = (uint32_t) ((int_Peroid / 24) / 1000);
PRINTF("\r\n interval between 2 rising edge =%u ms and %u us\r\n", time_Ms, time_Us);
gptIsrFlag_Overflow = 0; gptIsrFlag_Finish = false; } else { __WFI(); } }}
// 通过 GPT_GetDefaultConfig 函数获取默认的 GPT Capture 配置,参考 docs 目录下的 MCUXpresso SDK API Reference Manual_MIMX8MM6.pdf 文档,可以查到默认配置如下,如果需要也可以修改这个配置
config->clockSource = kGPT_ClockSource_Periph;
config->divider = 1U;
config->enableRunInStop = true;
config->enableRunInWait = true;
config->enableRunInDoze = false;
config->enableRunInDbg = false;
config->enableFreeRun = false;
config->enableMode = true;
// 通过 GPT_SetInputOperationMode 函数将 GPT Capture 模式初始配置为上升沿触发
// 为了处理 GPT Counter Overflow,使能对应中断
// while 函数循环执行当 gptIsrFlag_Finish 第二次中断采集结束标志位声明后,打印捕获的输入 PWM 波的半波周期。如果有溢出发生,则需要考虑增加相应的 0xffffffff 溢出计数次数。这里需要说明下,由于 NXP iMX8MM SoC 也受到如下 Errata 影响,因此 GPT Clock Source 只能使用内部 24M Hz 时钟源,所以这里 printf 函数直接使用 24M 来算出半波周期是多少 ms 和 us 。
https://www.nxp.com.cn/docs/en/errata/IMX8X_C0_0N99Z_ER.pdf
Verdin i.MX8MM Cortex-M4核心FreeRTOS GPT Capture示例部署测试
a). 将上述修改后的项目参考章节 3 的相关资料编译后,复制 gpt_capture.bin 可执行文件到 Verdin i.MX8MM 核心板 Linux /home/root 目录下保存。
b). 对Verdin i.MX8MM 模块进入 U-boot 命令行,通过如下命令配置 Cortex-M4 核心 Firmware 下载和运行
# setenv load_cmd "ext4load mmc 0:2"
# setenv m4image "/home/root/gpt_capture.bin"
> setenv m4image_size 17000
> setenv loadm4image "${load_cmd} ${loadaddr} ${m4image}"
> setenv m4boot "${loadm4image}; cp.b ${loadaddr} 0x7e0000 ${m4image_size}; dcache flush; bootaux 0x7e0000"
> saveenv
> run m4boot
c). Verdin i.MX8MM Cortex-M4 核心运行后其调试串口打印信息
GPT input capture example
Once the input signal is received the input capture half peroid is printed
d). 此时在 Verdin i.MX8MP 平台通过如下脚本使能 1kHz 50% 占空比 PWM 输出 10s 时间
#!/bin/sh
cd /sys/class/pwm/pwmchip0/
echo 0 > export
echo 1000000 > pwm0/period
echo 500000 > pwm0/duty_cycle
echo "normal" > pwm0/polarity
echo 1 > pwm0/enable
sleep 10
echo 0 > pwm0/enable
e). 这时 Verdin i.MX8MM Cortex-M4 调试串口就会打印出对应的半波周期
...Input Capture Half Period Value = 0ms and 500us
Input Capture Half Period Value = 0ms and 500us
Input Capture Half Period Value = 0ms and 500us
Input Capture Half Period Value = 0ms and 500us...
f). 尝试将 Verdin i.MX8MP PWM 修改为 10kHz 80%/20% 占空比
...echo 100000 > pwm0/periodecho 80000 > pwm0/duty_cycle...
g). Verdin i.MX8MM Cortex-M4 输出周期会对应变化
Input Capture Half Period Value = 0ms and 80us Input Capture Half Period Value = 0ms and 80us Input Capture Half Period Value = 0ms and 80us Input Capture Half Period Value = 0ms and 80us
h). 最后,由于 Verdin i.MX8MM GPT1 CAPTURE1 管脚在 Cortex-A53 核心 Linux 下默认是用于 WAKEUP GPIO 使用,如果需要同时运行 Verdin i.MX8MM Cortex-A53 核心和 Cortex-M4 核心,就需要在 Linux device-tree 文件中将 WAKEUP gpio-key 功能替换为其他 GPIO 管脚资源。
总结
本文简单示例了基于i.MX8MM Cortex-M4 核心 GPT Capture 功能供参考。
Author: 秦海,Toradex 销售工程师
Leave a comment
Please login to leave a comment!
Latest Blog
Friday, April 5, 2024
Tuesday, March 19, 2024
Friday, January 12, 2024